


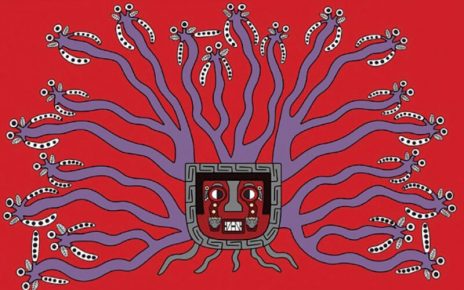
Enlarge / A miniature predatory robber fly (Holcocephala fascia) feeds on a captured rove beetle. A new study reveals that the fly approaches its prey from underneath, aiming for a future meeting point wth the target. (credit: Samuel Fabian)
Robber flies are aerodynamic acrobats, able to spot their prey, dodge around obstacles, and capture smaller insects at high speeds in midflights. Scientists have taken a closer look at how robber flies manage this amazing feat despite having brains on par with a single grain of sand. According to a new paper published in the Journal of Experimental Biology, the flies combine two distinct feedback-based navigation strategies: one that involves intercepting the prey when the view is clear, and another that allows the flies to swerve around any obstacles in their flight path.
One of the challenges in robotics is how to design robots that can navigate cluttered environments—something humans and other animals manage to do instinctively every day. Per the authors, many robotic systems rely upon a kind of path-planning: using sound (sonar) or lasers to send out signals and then detecting the reflections. That data can then be used to build a distance map of the surroundings.
But compared to using simple visual cues (i.e., “reactive methods”), path-planning is a costly approach in terms of energy use. Humans and other animals don’t require elaborate maps or specific knowledge about a target’s location, speed, and other details. We simply react to any relevant stimuli in our environment in real time. Devising navigational behavioral algorithms based on biological systems is thus of great interest to roboticists.
Read 10 remaining paragraphs | Comments

{kind=link}